ISO AWI TS 5083 Road vehicles — SAFETY FOR AUTOMATED DRIVING SYSTEMS
ISO 5083이란
자동화 주행차량의 안전한 운용은 가장 중요한 요인 중 하나
입니다. ISO5083은 기존의 ISO26262
기능안전성, ISO21448(SOTIF) 의도된 기능안전성, 자율주행 테스트 시나리오에 대한 각종 표준,
ISO21434 사이버보안까지 관련 모든 안전 표준을 포함하는 새로운 ‘자율주행 안전성 및 검증
가이드라인’입니다.
표준의 개요
이 표준은 도로 차량에 통합된 자동화 주행 시스템(ADS)의 안전을 달성하고 입증하기 위한 지침을 제공합니다. 이 접근법은 전 세계적으로 적용 가능한 간행물과 최상위 안전 목표에서 도출된 안전 원칙에 기초합니다. ISO/SAE PAS 22736에 따라 정의된 레벨 3 및 레벨 4 ADS 기능에 대한 설계, 검증 및 타당성 확인 및 배포 후 활동에 의한 안전을 고려합니다.
사이버 보안 고려사항에 대해 설명하며, 적용은 트럭과 버스를 포함하고 오토바이를 제외한 도로 차량을 대상으로 합니다.
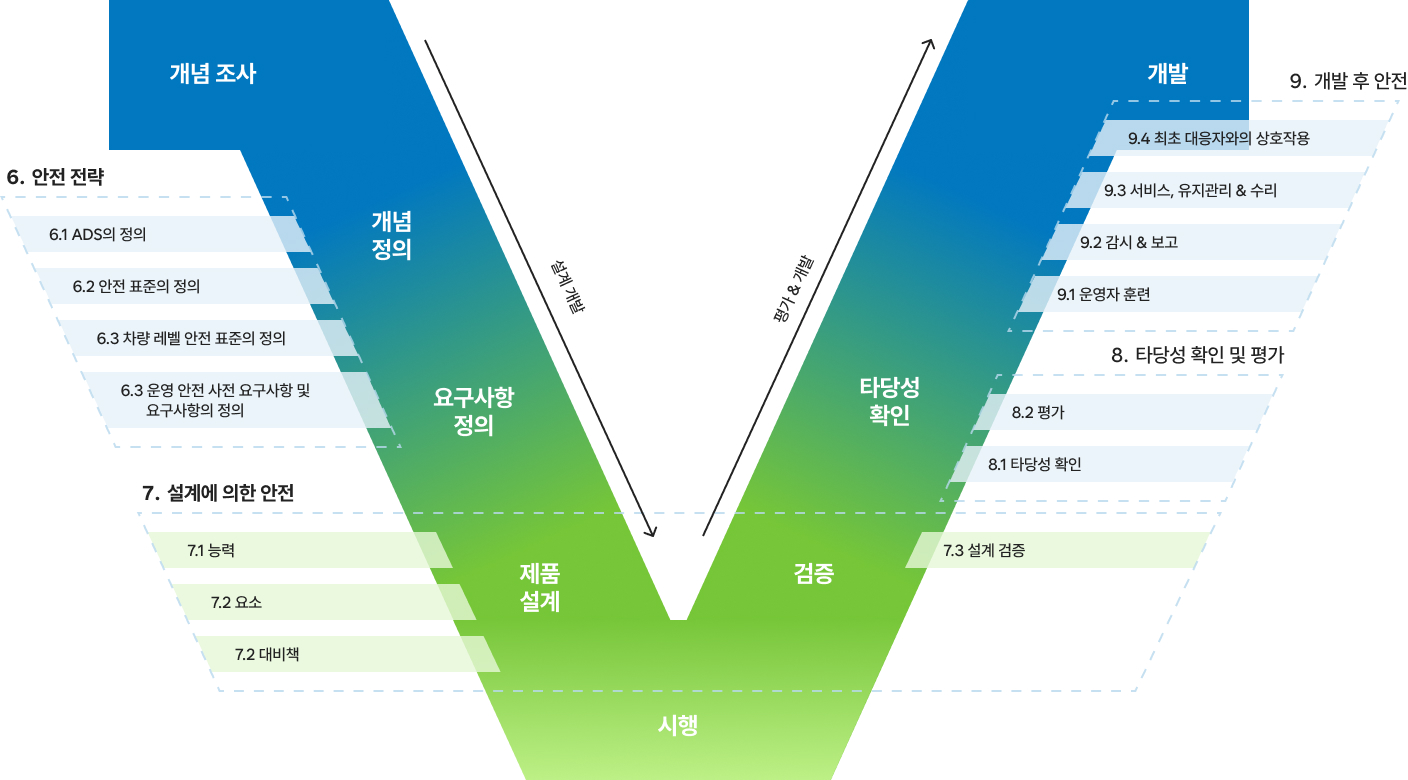
표준의 구조
ADS 및 구성 컴포넌트의 개발 및 배포는 일반적으로 제품 설계 및 배포를 위한 일반적인 프로세스 흐름을 따릅니다. 프로세스 흐름은 V-모델 안전 수명 주기로 표현되며, 좌측은 제품 설계 개발을 포함하고 우측은 평가 및 배포를 포함합니다. 실제로는 다양한 모델을 사용하고 보다 반복적인 프로세스를 따르는 시스템 및 구성 요소에 대한 여러 수명 주기가 있을 수 있습니다.
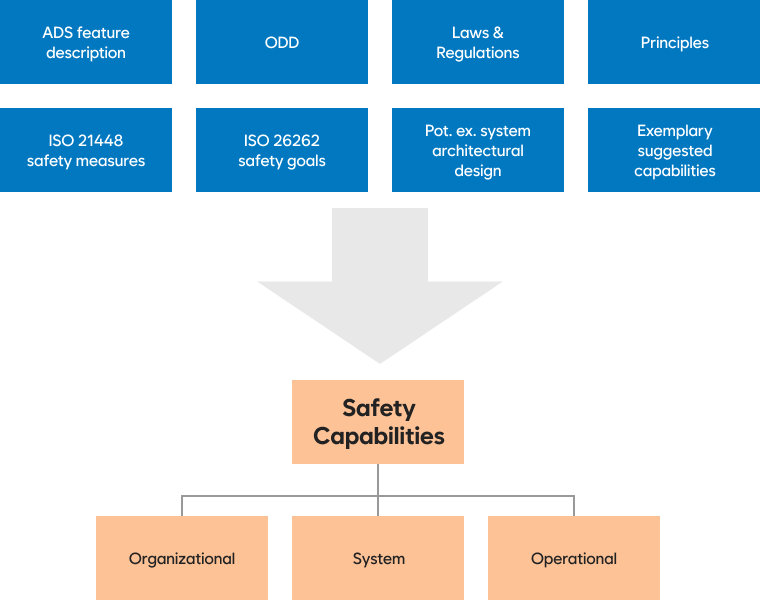
Defined Safety Strategy
- 01고려 중인 ADS 피처에 대해 운행설계범위(ODD)가
정의되어야 합니다. - 02ODD는 DDT 및 DDT 폴백의(레벨 4의 ADS의 경우)
지속적인 실행이
ODD 내부에서 시작되도록 정의해야 합니다. - 03고려 중인 ADS 피처의 유스 케이스는 ADS 피처와 사용자 및
환경 간의
상호작용을 포함하여 명시되어야 합니다. - 04ADS는 작동시 모든 주행 작업을 안전하게
수행하는 역할을 합니다. - 05ADS는 적절한 수의 위험최소화상태(MRC)이
정의되어야 합니다. - 06MRC의 정의는 안전한 이유에 대한 논의로
보완될 필요가 있습니다.
차량 수준의 안전 요구사항 정의
- 01ADS 피처에 대한 안전 요구사항을 정의해야 합니다.
- 02ADS 기능이 안전하게 작동하는 데 필요한 가정을
정의해야 합니다. - 03ADS 안전 요구사항은 해당 가정과 함께
6.2(안전 기준 정의)의
위험 수락 기준을 충족해야 합니다.
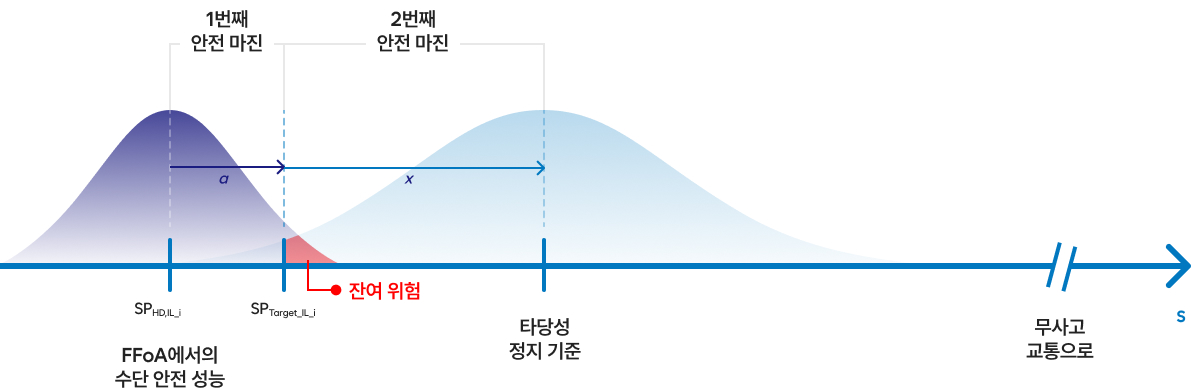
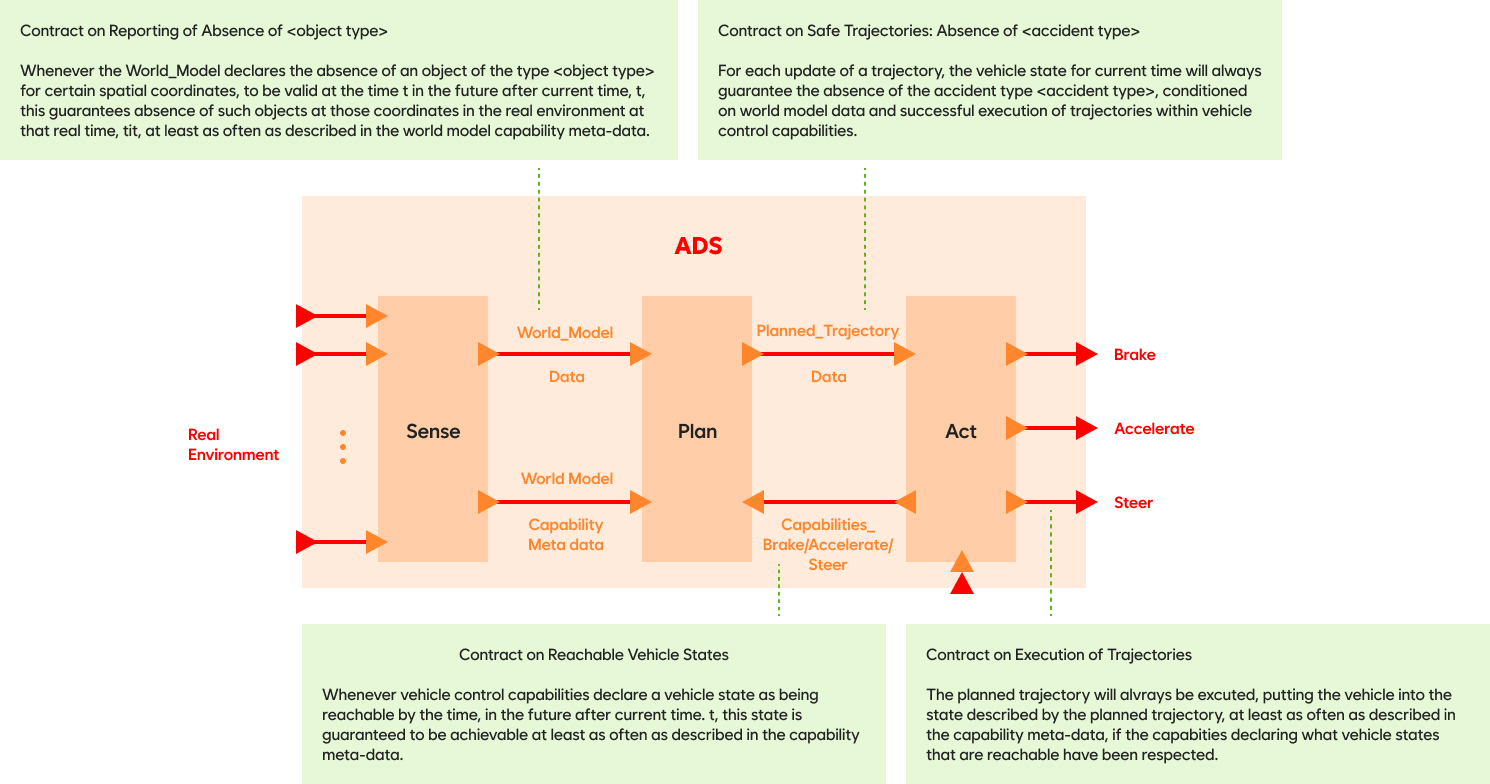
Safety by Design
안전 설계를 공식화하는 방법을 보여드리겠습니다. 기능적 설계를 사용하는 중요한 결정은 성능, 무결성 및 안전성의 분리
입니다. 안전은 정교한 안전 요구 사항을 충족함으로써 달성되며
성능은 이러한 제약 조건 하에서 달성할 수 있는것입니다. 실시간으로 전송되는 메타 데이터는 예를 들어 World Model에서 일부 데이터의 잘 정의된 사용이 올바른 정도
(예: "보고된 무결성에서 지정된 좌표에 보행자가 없음")를 표현
할 수 있습니다. World Model은 적어도 주어진 무결성을 충족
해야 합니다.
Verification & Validation
자율주행 시스템에 대한 검증 단계에는 다음과 같은 속성을 따라야 합니다.
- 01ADS의 구현이 ADS 설계의 요건을
충족한다는 증거를 제공합니다. - 02ADS에 대한 안전 요건이 의도된 용도와 ODD에 따라
ADS에 의해 달성된다는 증거를 제공합니다. - 03안전 타당성 확인 및 평가에 사용되는 증거를 생성합니다.
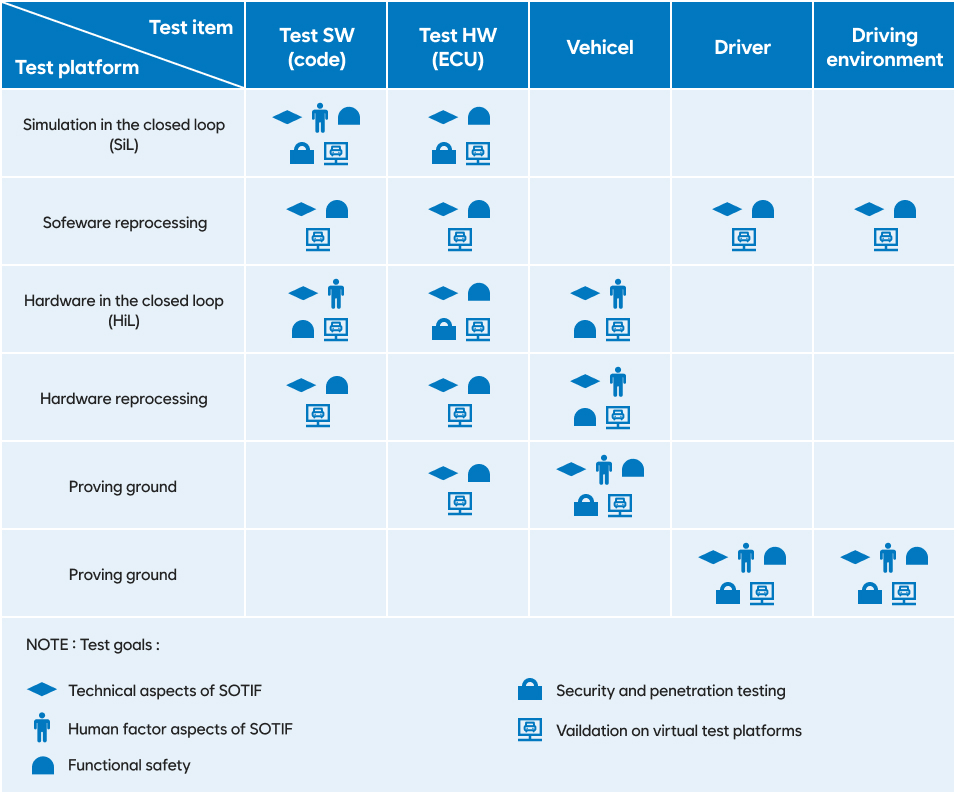
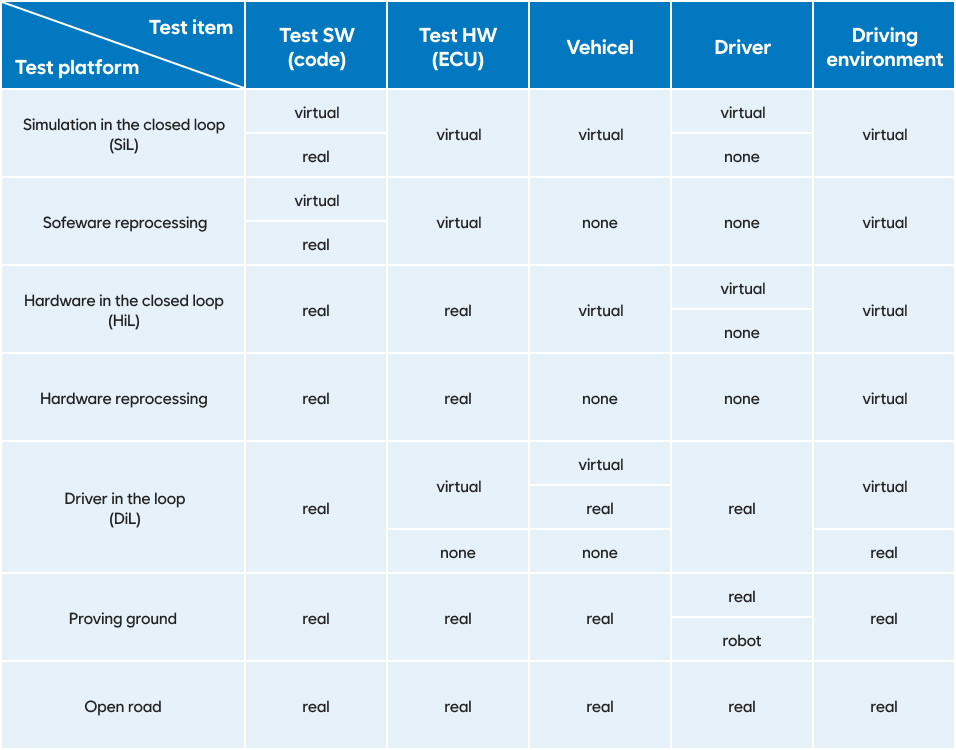
위의 검증전략을 기반으로 시험 환경은 다음과 같은 요구사항을 만족해야 합니다.
자율주행 대응을 위한 솔루션 제공
저희 씨엔비스㈜ 에서는 ASPICE 및 ISO26262 기능안전 프로세스에 대한 엔지니어링 컨설팅 능력을 바탕으로 자율주행 시스템에서 요구하는 5083의 요건사항에 대한 적용 방안 및 가이드 제공 및 엔지니어링 서비스를 통해 수준 높은 컨설팅 서비스를 제공하고 있습니다.